Wayformer: Motion Forecasting via Simple and Efficient Attention Networks
Abstract
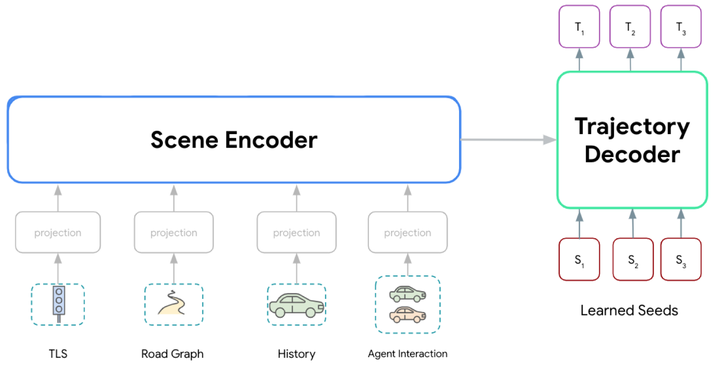
Wayformer proposes a simple and efficient attention-based architecture for motion forecasting in autonomous driving.
Type
Publication
Proceedings of the IEEE International Conference on Robotics and Automation
Rami Al-Rfou
Member of Technical Staff - TLM
My research interests include language modeling, embodied AI, motion forecasting, and multilingual modeling.